Por Ying Hong Pheh ORCIDO,Shane Kyi Hla gana ORCIDOyShaohui Foong*ORCIDO
Pilar de desarrollo de productos de ingeniería, Universidad
de Tecnología y Diseño de Singapur (SUTD), 8 Somapah Road, Singapur 487372,
Singapur
*
Autor a quien debe dirigirse
la correspondencia.
Drones 2022 , 6 (9), 260; https://doi.org/10.3390/drones6090260
Envío recibido: 29 de julio de
2022 / Revisado: 9 de septiembre de 2022 / Aceptado: 12 de septiembre de 2022 /
Publicado: 18 de septiembre de 2022
Abstract
Incluso cuando las
interacciones entre humanos y robots se vuelven cada vez más comunes, los
pequeños sistemas de aeronaves no tripuladas (sUAS, por sus siglas en inglés)
convencionales, generalmente multicópteros, pueden seguir siendo inseguros para
su despliegue en un ambiente interior muy cerca de los humanos sin importantes
precauciones de seguridad. Esto se debe a sus hélices que giran rápidamente y a
la falta de un mecanismo de seguridad en caso de pérdida de energía. Un
dirigible no rígido lleno de gases más ligeros que el aire es inherentemente
más seguro ya que "flota" en el aire y generalmente es incapaz de
moverse a alta velocidad. El dron esférico con efecto Coandă para interiores
(SpICED) es un diseño de dirigible esférico novedoso y seguro propulsado por
impulsores cerrados que utilizan el efecto Coandă. A diferencia de un
multicóptero o un dirigible de hélice convencional, los impulsores cerrados
reducen los riesgos de seguridad para las personas y los objetos circundantes,
lo que permite que SpICED funcione muy cerca de los humanos y abre la
posibilidad de nuevas interacciones entre humanos y drones. El diseño
implementa múltiples rotores de impulsor cerrado como unidades de propulsión
para acelerar el flujo de aire a lo largo de la superficie del dirigible
esférico y producir empuje utilizando el efecto Coandă. Se presenta una
configuración cúbica con ocho unidades de propulsión unidireccional, junto con
los controladores Proporcional-Integral-Derivativo (PID) de circuito cerrado y
un algoritmo de mezcla de control personalizado para el control de posición y
actitud en los tres ejes. Se construyó un prototipo físico de la unidad de
propulsión y el dirigible sUAS para validar experimentalmente el comportamiento
dinámico y los controles en un entorno de captura de movimiento, y los
resultados experimentales se compararon con la configuración tetra lateral con
cuatro unidades de propulsión bidireccionales como se presentó en nuestro
estudio anterior. artículo de conferencia publicado. Se observó una reducción
de hasta el 40 % en el error de control de trayectoria en la nueva
configuración del cubo, que también es capaz de controlar el movimiento en los
seis grados de libertad (DoF) con control adicional de cabeceo y balanceo en
comparación con la configuración tetra lateral.
Palabras clave: dirigible ; efecto coandă ; pequeños
sistemas de aeronaves no tripuladas (sUAS) ; vehículo aéreo no tripulado (UAV).
1. Introducción
El avance de la tecnología de
los sUAS de consumo en los últimos años ha permitido muchas aplicaciones en
entornos interiores, como inspecciones, vigilancia, publicidad, etc. Muchas de
estas aplicaciones utilizaron sUAS multicópteros, principalmente debido a su
alta capacidad de carga útil, alta maniobrabilidad y construcción mecánica
simple. Existen muchas fuentes de perturbaciones externas para los vuelos de
sUAS en un ambiente al aire libre, como fuertes ráfagas de viento; por lo
tanto, en dicho entorno operativo, la alta maniobrabilidad de un multicóptero
es esencial para su funcionamiento estable y confiable. Sin embargo, en un
ambiente interior, esta alta maniobrabilidad suele ser innecesaria, mientras
que las otras características de un multicóptero, como su baja resistencia de
vuelo, su alto nivel de ruido y sus altos riesgos de seguridad, a menudo son
indeseables ya que opera muy cerca de obstáculos y humanos. Por ejemplo, según
un artículo de Airborne Drones [ 1 ], un dron de consumo, como el DJI Phantom 4
Pro [ 2 ], puede producir niveles de ruido de hasta 81 decibeles, lo que
equivale al fuerte ruido del tráfico en una carretera a una quemarropa. Niveles
de ruido tan altos pueden impedir las comunicaciones de voz efectivas entre
humanos cercanos y causar molestias y contaminación acústica significativas,
especialmente en un ambiente interior, donde el ruido puede amplificarse debido
a los reflejos y el eco.
Los SUAS multicópteros también
presentan importantes riesgos de seguridad cuando operan cerca de humanos
debido a sus hélices de rápida rotación, ya que las lesiones de las hélices son
el principal mecanismo de lesiones relacionadas con drones, según un estudio de
Johnson et al. [ 3 ]. Los riesgos de seguridad asociados con el uso de un sUAS
multicóptero a menudo conducen al despliegue de medidas de seguridad mediante
el aislamiento físico de los humanos cercanos del sUAS en funcionamiento. Esto
provoca ineficiencias en el uso del espacio de trabajo y baja concurrencia en
las aplicaciones donde los trabajadores pueden tener que esperar para realizar
su trabajo en el mismo espacio de trabajo. Los riesgos de seguridad, junto con
la baja resistencia de vuelo de los sUAS multicópteros, también requieren el
empleo de personal dedicado para la operación del sUAS, lo que aumenta los
costos de implementación de la tecnología sUAS para diversas aplicaciones en
interiores.
Debido a la naturaleza
peligrosa de los SUAS multicópteros cuando operan en estrecha proximidad con
humanos, ha habido una falta de desarrollo y aplicaciones que impliquen
interacciones o cooperación entre drones y humanos, excepto para drones muy
livianos de alrededor de 20 g de masa. Como tal, el desarrollo de un nuevo tipo
de sUAS adecuado para operar cerca de humanos en un ambiente interior puede
crear oportunidades en aplicaciones novedosas como publicidad, entretenimiento,
inspección, seguridad, etc.
Un dirigible es un tipo de
dirigible que depende del levantamiento de gases como el helio para mantener su
forma y flotabilidad en el aire. Su naturaleza más ligera que el aire le
permite "flotar" en el aire, incluso en caso de pérdida total de
potencia de propulsión, y su cuerpo lleno de gas, que ocupa un gran volumen,
tiene una gran resistencia aerodinámica, lo que hace que su vuelo menos
dinámico y más predecible. Estas propiedades inherentes del dirigible lo hacen
significativamente menos peligroso para las personas que lo rodean en
comparación con un suAS multicóptero con hélices que giran rápidamente,
especialmente en un ambiente interior.
1.1. Revisión de literatura
Skye, un dirigible
omnidireccional esférico, presentado por M. Burri et al. [ 4 ], es capaz de
realizar un movimiento de seis grados de libertad (DoF) con sus cuatro unidades
de actuación dispuestas en forma tetraédrica, que consisten en un servomotor
para la rotación y una hélice impulsada por un motor con un protector de
hélice. La complejidad mecánica y el diseño de las unidades de accionamiento
pueden sufrir daños en caso de impacto y su tamaño de 2,7 m de diámetro es
demasiado grande para implementarse en espacios más reducidos. La protección de
la hélice también puede ser insuficiente para reducir los riesgos de seguridad
alrededor de las personas; por ejemplo, los pelos largos pueden enredarse en
las hélices que giran rápidamente si entran en contacto.
De manera similar, el dron
Halo de la startup Spacial [ 5 ] es un dirigible propulsado por hélices
laterales que está diseñado para aplicaciones de filmación aérea en interiores.
Aerobots desarrollados por I. Sharf et al. [ 6 ], un prototipo de dirigible
esférico para fines de emulación de satélites, funciona con ventiladores con
conductos eléctricos montados lateralmente y es capaz de controlar el
movimiento con seis grados de libertad. BalloonCam™ de Panasonic [ 7 ] fue
diseñado para tener las hélices del cuadricóptero ocultas en los cuatro cortes
verticales de la estructura envolvente del dirigible. Todos estos diseños son
de tamaño relativamente grande y las hélices parcialmente expuestas pueden
presentar riesgos de corte y enredo para los humanos cercanos.
Festo ha desarrollado a lo
largo de los años una amplia variedad de robots aéreos más ligeros que el aire.
El proyecto eMotionSpheres [ 8 ] mostró múltiples dirigibles esféricos,
propulsados por hélices montadas lateralmente, que realizaban un vuelo preciso
y sincronizado en un ambiente interior. Mientras que FreeMotionHandling [ 9 ],
otro dirigible esférico, tiene una pinza accionada neumáticamente integrada en
su envoltura de gas helio, ambos proyectos mostraron la versatilidad de una
plataforma de dirigible en un ambiente interior. Sin embargo, el uso de hélices
de giro rápido en estos dirigibles todavía plantea algunos riesgos de seguridad
para las personas y los objetos circundantes.
Inspirándose en varios
animales, como pingüinos, mantarrayas y medusas, Festo también ha diseñado una
serie de robots aéreos con un método de propulsión mecánica mediante
biomímesis. Los AirPenguins [ 10 ] 'nadan' en el mar de aire mediante el uso de
mecanismos de aleteo unidos a los lados de la envoltura esferoide alargada. El
Air_ray [ 11 ] tiene la forma de una mantarraya e imita su movimiento a través
de un mecanismo de aleteo integrado en la envoltura del dirigible, que le
permite deslizarse por el aire, de forma muy parecida a cómo las mantarrayas
nadan en el mar. El AirJelly [ 12 ] está formado por una envoltura esférica de
1,3 metros de diámetro, con ocho aletas accionadas mecánicamente conectadas al
cuerpo a través de una estructura flexible similar a un tentáculo. De manera
similar a cómo se mueve una medusa en el agua, AirJelly se impulsa hacia arriba
empujando el aire hacia abajo a través del movimiento mecánico de aleteo de las
ocho aletas conectadas, mientras que la dirección lateral del movimiento está
controlada por un péndulo, que desplaza el centro de masa de AirJelly. Estos
métodos de propulsión mecánica basados en el biomimetismo son fascinantes de
observar y, en general, seguros de operar cerca de humanos debido al movimiento
relativamente lento de los mecanismos de aleteo. Sin embargo, estos mecanismos
de aleteo son complejos y están integrados en el diseño de la envoltura del
dirigible, lo que puede aumentar los costos de mantenimiento de dichos sistemas
si se implementan como un sUAS en un ambiente interior. El movimiento de
"natación" de estos dirigibles aéreos también puede ser menos
maniobrable, requiriendo un gran radio de giro para alterar su dirección de
vuelo, lo que puede hacerlos inadecuados para aplicaciones con espacios de
vuelo más pequeños y que requieren un control de vuelo de precisión.
Además de producir empuje
utilizando medios mecánicos, Poon et al. [ 13 ] han desarrollado una tecnología
de propulsión silenciosa y sin vibraciones para dirigibles de vigilancia en
interiores que utilizaban el viento iónico producido por un volante iónico a
bordo para impulsar. Si bien es deseable un sistema de dirigible interior
silencioso, la naturaleza de alto voltaje de un sistema de propulsión iónica
hace que no sea seguro operarlo cerca de seres humanos y objetos que sean
sensibles a las descargas eléctricas.
En la búsqueda de una
plataforma sUAS perfectamente segura para uso en interiores cercanos, Wataru et
al. [ 14 ] han desarrollado ZeRONE, un dirigible esférico que utiliza
microsopladores piezoeléctricos para evitar el uso de una hélice para la
propulsión. El sistema de propulsión construido mediante conjuntos de
microsopladores piezoeléctricos es seguro, silencioso y eficiente; sin embargo,
el empuje generado es débil e insuficiente para impulsar el dirigible a
velocidad de marcha.
S-CLOUD, un dirigible con
forma de toro diseñado por Song et al. [ 15 ], tiene hélices coaxiales
colocadas en el orificio de la envoltura del toro para producir empuje
vertical. Debajo de las hélices se coloca una aleta de dos ejes controlada por
un servomotor para desviar el flujo de aire descendente hacia un lado. El flujo
de aire desviado luego se une y sigue la superficie curva inferior de la
envoltura del toro debido al efecto Coanda, que resulta en un empuje lateral.
Este enfoque es innovador en la forma en que utiliza la superficie curva de la
envoltura de gas helio en forma de toro como un medio para redirigir el flujo
de aire a través del efecto Coandă.
1.2. Aportes de este trabajo
En este artículo, se presenta
un nuevo método de propulsión y control para dirigibles esféricos en miniatura
de interior llamado Spherical Indoor Coandă Effect Drone (SpiCED). El objetivo
de la investigación es desarrollar un pequeño sistema de aeronave no tripulada
(sUAS) que sea seguro para operar en estrecha proximidad con humanos en
espacios interiores reemplazando las hélices típicamente empleadas en
dirigibles, sUAS [ 4 , 5 , 6 , 7 , 15 ] . , con un diseño de impulsor cerrado,
que aísla los bordes afilados y que giran rápidamente del entorno. En
comparación con los robots aéreos biomiméticos de Festo [ 10 , 11 , 12 ], el
diseño SpICED es más maniobrable y puede trasladarse en cualquier dirección sin
un gran radio de giro. También es más seguro que la propulsión de viento iónico
de alto voltaje [ 13 ] y proporciona más empuje para velocidades de movimiento
más altas en comparación con la propulsión basada en microsopladores
piezoeléctricos [ 14 ]. El sistema de propulsión de bajo perfil de SpICED se compone
de múltiples unidades de propulsión (PU) con impulsores cerrados que son
impulsados directamente por motores de CC sin escobillas, que proporcionan
una fuerza de empuje a través del efecto Coandă en el cuerpo esférico del
dirigible.
El diseño SpICED es
intrínsecamente seguro ya que normalmente no pesa debido a la flotabilidad del
gas helio. Incluso en caso de pérdida total de potencia, SpICED permanece
suspendido en el aire, a diferencia de un accidente, que le puede ocurrir a un
multicóptero en tal escenario. El criterio contundente [ 16 , 17 , 18 , 19 ]
calculado para un varón adulto humano impactado en el pecho por el prototipo
SpICED a una velocidad de 1 m/s es -8,9; por lo tanto, en este caso la
probabilidad de sufrir una lesión menor es nula. El componente de mayor
velocidad de SpICED es el impulsor cerrado, que tiene un perfil muy bajo con
bordes afilados ocultos, lo que minimiza cualquier riesgo de lesiones.
En un artículo de conferencia
publicado anteriormente [ 20 ], presentamos una versión de este sUAS dirigible
para interiores con cuatro PU bidireccionales y demostramos la controlabilidad
del sUAS con resultados experimentales. En este artículo, estamos explorando
una nueva configuración del diseño, con ocho PU unidireccionales, para una
mejor maniobrabilidad y respuesta de control.
Nuestras contribuciones en
este artículo son las siguientes:
La introducción de una Unidad
de Propulsión (PU) unidireccional compuesta por un impulsor cerrado con paletas
curvas, y una comparación entre la PU unidireccional y la PU bidireccional con
paletas rectas, como se presentó en el artículo anterior [ 20 ].
La introducción del sistema de
propulsión de configuración cúbica con ocho PU, que elimina la necesidad de PU
bidireccional en comparación con otras configuraciones.
Resultados experimentales
tanto del rendimiento de la PU unidireccional como del control de vuelo en
circuito cerrado del prototipo de dirigible sUAS con configuración cúbica, en
comparación con la configuración tetra lateral previamente explorada.
2. Diseño de SpICED
2.1. Diseño de la Unidad de
Propulsión (PU)
El diseño del dirigible
propuesto es propulsado por PU en la superficie del dirigible, que aceleran
directamente el flujo de aire a lo largo de la superficie del dirigible
esférico. El flujo de aire acelerado se adhiere a la superficie curva del
cuerpo esférico debido al efecto Coandă. Esto crea una presión de aire más baja
sobre la superficie y produce una elevación aerodinámica en el cuerpo del
dirigible. La forma esférica de la envoltura del dirigible se elige de modo que
el efecto Coandă se produzca por igual en todas las direcciones radiales.
Como se ilustra en la Figura 1,
cada PU se compone de un impulsor cerrado, unido al rotor de un motor eléctrico
sin escobillas de CC, con la base del motor unida a una placa de montaje que
permite fijar la PU a la superficie del dirigible. con el uso de adhesivo. El
motor eléctrico sin escobillas hace girar el impulsor, que, a su vez, aspira
aire desde la entrada del impulsor y expulsa el flujo de aire acelerado
radialmente hacia afuera sobre la superficie del dirigible. Aparte de las
fuerzas de elevación producidas por el flujo de aire acelerado, la rotación del
rotor y el impulsor produce un par de reacción en el cuerpo del dirigible al
que está unida la base del motor. Este par de reacción se puede utilizar para
manipular la orientación del dirigible en vuelo.
Drones
06 00260 g001 550

Figura
1. Vista lateral que muestra la interacción física entre el impulsor y el aire
circundante.
La Figura 2a muestra un diseño
de impulsor con paletas radiales rectas simétricas; Aunque es menos eficiente
en comparación con un impulsor de paletas curvadas hacia atrás, tiene un
rendimiento idéntico en ambos sentidos de rotación. Esto permite que el par de
reacción del impulsor giratorio se utilice para controlar la orientación del
dirigible, sin colocar las PU en una disposición de pares contrarrotativos. En
un impulsor de paletas rectas, la dirección de empuje sigue siendo la misma
independientemente de la dirección de rotación. Esta PU con impulsor de paletas
rectas se denominará PU bidireccional.

Figura
2. Vista isométrica de impulsores en la PU, ( a ) Impulsor con paletas rectas,
( b ) Impulsor con paletas curvas.
La Figura 2 b muestra un
diseño de impulsor con paletas de impulsor curvas. El diseño se modela con la
asistencia del software de la turbomaquinaria, con parámetros para mejorar la
eficiencia y el rendimiento en comparación con el impulsor de paletas rectas;
sin embargo, la naturaleza no simétrica de este diseño de impulsor no produce
la misma cantidad de empuje si se gira en la dirección opuesta. Por lo tanto,
está diseñado para girar y producir torsión únicamente en una sola dirección, y
es posible que se requieran más PU con este impulsor para controlar la
orientación del dirigible en vuelo. Una PU con este impulsor de paletas curvas
se denominará PU unidireccional.
Como afirma RI Ahmed et al. [
21 ] en su investigación sobre la aerodinámica de un microvehículo aéreo (MAV)
de efecto Coandă, las fuerzas de sustentación totales generadas por la manta de
efecto Coandă en un MAV de efecto Coandă semiesférico son las siguientes:
𝐹𝑃=𝐹𝑀+𝐹𝑃 𝐷 (1)
dónde𝐹𝑃 representa
el empuje neto,𝐹𝑀
representa
fuerzas de elevación vertical debido al equilibrio de impulso de la manta
Coandă y𝐹𝑃 𝐷 representa las fuerzas
de elevación debidas a la diferencia de presión en el cuerpo MAV sujeto a la
manta Coandă, como se muestra en la Figura 1 . En nuestras consideraciones
aerodinámicas en este trabajo, asumimos que el empuje y el par producido por la
PU, 𝐹𝑃 y𝜏𝑃, son
proporcionales al cuadrado de la velocidad de rotación, 𝜔2. 𝐹𝑃 y𝜏𝑃 , se
aproximan de la siguiente manera para nuestro modelo dinámico, con referencia a
[ 22 ]:
𝐹𝑃=𝛽𝑡𝜔2 (2)
𝜏𝑃=𝛽𝑑𝜔2 (3)
Dónde𝛽𝑡 es el
coeficiente de empuje del impulsor y𝛽𝑑
es
el coeficiente de resistencia del impulsor, los cuales se encuentran
empíricamente en las investigaciones experimentales de la Sección 3.3 . La
suposición de que 𝐹𝑃
y𝜏𝑃 son
proporcionales a𝜔2 también
se valida con hallazgos empíricos, como se muestra en la Sección 4.1.1 .
2.2. Configuraciones del
sistema de propulsión de unidades múltiples
Como cada PU solo es capaz de
producir empuje y torsión a lo largo de un único eje, es necesario desplegar
múltiples PU para lograr el control de vuelo necesario para el dirigible. El
requisito mínimo de control de vuelo para un dirigible típico es la capacidad
de trasladarse en un espacio tridimensional y girar alrededor del eje de
guiñada.
En la Figura 3 se consideraron
y compararon varias configuraciones para la colocación de las PU . Generalmente
es mejor elegir una configuración que utilice menos PU, ya que esto reduce la
masa total del sistema de propulsión, lo que, a su vez, permite asignar una
mayor parte del presupuesto de masa a la batería y la carga útil. Para el
movimiento de traslación en el espacio tridimensional, sólo se necesita el
componente de empuje del PU, mientras que el par de reacción del PU se requiere
para el control de la guiñada; por lo tanto, será favorable posicionar la PU
para contrarrestar los pares de reacción y evitar introducir una rotación
involuntaria cuando solo se requiere empuje.

Figura 3. Tipos de configuración considerados. n = número de UP. ( a ) Cubo, ( b ) Prisma, ( c ) Pirámide, ( d ) Tetraedro, ( e ) Tetraedro lateral. Consulte la Tabla 1 para conocer las coordenadas de las PU.

En la configuración de cubo
que se muestra en la Figura 3 a, hay ocho PU, la mayor cantidad en todas las
configuraciones consideradas, y están colocadas en la superficie del dirigible
a igual distancia entre sí, formando la posición de las PU una cubo interno.
Esta configuración permite el uso de un diseño de impulsor no simétrico, ya que
hay dos PU que giran en sentido contrario en todas las direcciones, por lo que
el par no deseado producido por un impulsor que gira puede ser cancelado por
otro impulsor adyacente que gira en la dirección opuesta con el misma
velocidad. La gran cantidad de actuadores también permite controlar esta
configuración en los seis DoF con la adición del control del ángulo de cabeceo
y balanceo. El grado de libertad extra controlable puede permitir nuevos casos
de uso, por ejemplo, el control del campo de visión de una cámara montada fija
en el dirigible. De todas las configuraciones consideradas, esta es la única
que no contiene ningún acoplamiento entre movimientos en los seis DoF. Sin
embargo, un sistema de propulsión con dicha configuración también será más
pesado y reducirá el presupuesto de masa para otros componentes, como la
batería.
En la configuración de prisma
que se muestra en la Figura 3 b, hay seis PU montadas de manera contrarrotante,
con la posición de montaje de los impulsores formando una forma de prisma
interno. El grupo superior e inferior de PU se montan con un ángulo desplazado𝛼
desde el plano horizontal XY.
Los pares de PU superior e inferior adyacentes pueden trabajar juntos en
contrarrotación para cancelar el momento de guiñada neto mientras se trasladan
en una dirección particular. Sin embargo, puede estar en desventaja ya que sus
movimientos de guiñada y altitud están acoplados debido al número impar de PU
en la parte superior e inferior.
En la configuración piramidal
que se muestra en la Figura 3 c, hay cinco PU en total, con cuatro de las PU
montadas en el hemisferio inferior del dirigible, mirando hacia los lados y
ligeramente hacia abajo en el ángulo.𝛼
. Las cuatro PU inferiores
forman la base de la forma piramidal y la quinta PU se coloca en la parte
superior y se alinea con el eje Z del cuerpo del dirigible, para formar el pico
en la forma piramidal. Esta configuración tiene un número impar de PU en la
parte superior y un número par en la parte inferior. Esto significa que su
movimiento ascendente está acoplado con la guiñada, mientras que el movimiento
descendente está desacoplado de la guiñada. Sus movimientos de traslación
lateral están ligeramente acoplados tanto con la altitud como con la guiñada,
pero esto se puede resolver fácilmente mediante el uso de un controlador de
retroalimentación.
La configuración del tetraedro
que se muestra en la Figura 3 d es similar a la configuración de la pirámide en
la Figura 3 c, excepto que tiene cuatro PU en total, y solo tres PU forman la
base interna de la forma del tetraedro. Esta configuración utiliza el número
más bajo de PU, con un número impar de PU tanto para la parte superior como
para la inferior, acoplando el movimiento vertical con la guiñada. Tiene una PU
menos para el movimiento lateral en comparación con la configuración piramidal,
que combina el movimiento lateral con el control de guiñada. De manera similar,
este acoplamiento entre el movimiento lateral y la guiñada se puede resolver
mediante el uso de un controlador de retroalimentación.
Por último, se explora una configuración de tetraedro lateral con cuatro PU que se muestra en la Figura 3 e. La diferencia entre la configuración de tetraedro lateral y tetraedro es la orientación interna de la forma, donde la configuración de tetraedro tiene una base alineada horizontalmente y la configuración de tetraedro lateral tiene su borde en la parte inferior. Esta configuración tiene pares de PU montadas en el hemisferio superior e inferior y desacopla completamente el movimiento vertical de la guiñada. Está ligeramente acoplado para movimiento lateral y guiñada, lo que también se puede resolver mediante un controlador de retroalimentación.Las coordenadas de posición de las PU para cada configuración se pueden encontrar en la Tabla 1.
2.3. Dinámica del sistema y
control del dirigible de propulsión de unidades múltiples
De las cinco configuraciones
del sistema de propulsión descritas en la Sección 2.2 , la configuración del
tetraedro lateral fue investigada en nuestro artículo anterior [ 20 ], con
resultados experimentales que muestran controlabilidad, con solo cuatro PU. En
este artículo, se selecciona la configuración del cubo con ocho PU sobrantes
para su análisis y comparación con la configuración del tetraedro lateral.
Como se identificó en nuestro
artículo anterior [ 20 ], la PU bidireccional requiere la inversión de la
dirección de rotación en vuelo para el control del par en la configuración de
tetraedro lateral. Sin embargo, esta inversión no se puede lograr rápidamente
debido a la inercia rotacional del impulsor, lo que resulta en un retraso
durante la inversión rotacional que afecta el rendimiento del control de la
configuración de tetraedro lateral. La disposición de las PU en la
configuración de tetraedro lateral también introduce el acoplamiento entre
diferentes ejes de control; por ejemplo, cuando se requiere traslación
horizontal, solo se activa una PU, lo que produce un par que resulta en una
desviación de guiñada, que debe corregirse con otras PU. Esto complica el
algoritmo de control del sistema y dio lugar a un prototipo con un rendimiento
de control inferior al ideal.
Para abordar estos problemas
de control, la configuración cúbica utiliza PU unidireccionales, que no
requieren inversión de rotación con los beneficios adicionales del mayor empuje
y eficiencia del impulsor de paletas curvas. Con el doble de número de PU en
comparación con la configuración de tetraedro lateral, la disposición cúbica de
las PU en la configuración de cubo permite que las PU trabajen en pares
contrarrotativos para cancelar el torque de cada uno, lo que elimina el
problema del acoplamiento de control en el configuración de tetraedro lateral.
El número adicional de PU en la configuración de cubo también permite un
control adicional de los ejes de cabeceo y balanceo, que no estaba presente en
la configuración de tetraedro lateral.
Las siguientes subsecciones
describen el modelo dinámico del dirigible para las configuraciones del cubo.
Modelo dinámico de
configuración del cubo
El diagrama de cuerpo libre de
la configuración del cubo se ilustra en la Figura 4 ; el marco mundial se
denota como𝝃𝑾 y la
estructura del cuerpo𝝃𝑩. Las
PU están montadas en la superficie del dirigible esférico con las coordenadas
formando internamente un cubo con bordes de igual longitud, lo que significa
que cada PU está montada a la misma distancia de las PU adyacentes. El sentido
de rotación de cada PU es el opuesto al de sus PU adyacentes, lo que significa
que, a medida que P1 gira en sentido antihorario, sus PU adyacentes (P2, P4 y
P5) giran en el sentido de las agujas del reloj. La flecha de rotación azul en
cada una de las PU que se muestra en la Figura 4 indica su dirección de
rotación. Cada una de las PU es capaz de producir empuje. 𝑭𝑷 y par𝝉𝑷 , como
se indica en las ecuaciones ( 2 ) y ( 3 ), respectivamente.

Figura 4. Diagrama de cuerpo libre de SpICED (Cube) con PU de impulsor de paletas curvas.
Como se ilustra en la Figura 4 , P1, P3, P6 y P8 giran en el sentido contrario a las agujas del reloj, y P2, P4, P5 y P7 giran en el sentido de las agujas del reloj.
Las baterías y los componentes
electrónicos están montados tanto en la parte superior como en la inferior del
cuerpo del dirigible; así, el CG del dirigible coincide con el centro
geométrico del cuerpo esférico del dirigible, con la fuerza de sustentación del
gas helio.𝑭𝑯. Actuando
directamente sobre el CG, anulando la fuerza de gravedad.𝑭𝑮 debido
a su flotabilidad neutra. Como no hay una distancia de compensación entre la
fuerza de elevación y la fuerza de gravedad, no hay momento de restauración en
los ejes de cabeceo y balanceo que están presentes en la configuración de
tetraedro lateral, y el dirigible puede girar libremente en los tres ejes. Esta
es la propiedad que permite controlar el ángulo de cabeceo y balanceo en esta
configuración. Sin embargo, debido al montaje de baterías pesadas en la parte
superior e inferior del dirigible, los momentos de inercia de los ejes de
cabeceo y balanceo son significativamente mayores que los del eje de guiñada.
La suma de fuerzas y momentos
que actúan sobre el modelo se puede resumir de la siguiente manera:
∑ 𝑭=𝑭𝑷𝟏+𝑭𝑷𝟐+𝑭𝑷𝟑+𝑭𝑷𝟒+𝑭𝑷𝟓+𝑭𝑷𝟔+𝑭𝑷𝟕+𝑭𝑷𝟖+𝑭𝑯+𝑭𝑮 (4)
∑ 𝑴=𝝉𝑷𝟏+𝝉𝑷𝟐+𝝉𝑷𝟑+𝝉𝑷𝟒+𝝉𝑷𝟓+𝝉𝑷𝟔+𝝉𝑷𝟕+𝝉𝑷𝟖 (5)
{𝑚𝒗˙= ∑ 𝑭𝑰𝝎𝑩˙= -𝝎𝑩× 𝑰𝝎𝑩+ ∑ 𝑴 (6)
donde m es la masa del dirigible, 𝑰 es el momento de inercia del dirigible respecto de su CG, y𝝎𝑩 es la velocidad angular del dirigible.
En comparación con la
configuración del tetraedro lateral, la configuración del cubo difiere en la
posición de su CG. El CG en la configuración de tetraedro lateral está debajo
del centro geométrico de su envoltura esférica del dirigible debido a la ubicación
de su batería y electrónica. La distancia entre los puntos de la fuerza de
elevación de los gases de helio y la fuerza de gravedad provoca un momento de
autoadrización alrededor de los ejes de cabeceo y balanceo del dirigible. Esta
diferencia es intencional, ya que la configuración del tetraedro lateral está
diseñada para ser controlable en cuatro DoF, mientras que la configuración del
cubo es controlable en seis DoF.
2.4. Sistema de control de
circuito cerrado
Para la configuración de
tetraedro lateral, los controladores Proporcional-Integral-Derivativo (PID)
solo se aplican para cada uno de los cuatro grados de libertad controlables, es
decir, las posiciones X, Y, Z y el ángulo de guiñada (𝜓), mientras que la
configuración del cubo tiene dos DoF controlables adicionales, a saber, el tono
(𝜃) y rodar (𝜙) ángulo, como se
muestra en la Figura 5 . La salida de los controladores se alimenta a un
mezclador de salida de control único que asigna la salida del controlador a una
señal del actuador para cada PU. [𝑢1,𝑢2,𝑢3,𝑢4,𝑢5,𝑢6,𝑢7,𝑢8].

Figura 5. Diagrama de control de SpICED (Cube).
2.5. Mezcla de salida de
control para configuración de cubo
Mientras que la configuración
de tetraedro lateral utiliza PU con un impulsor recto, que está diseñado para
girar en ambas direcciones, para la configuración de cubo, utiliza PU con un
impulsor de paletas curvas que, como se menciona en la Sección 2.1, está
diseñado para girar solo en una sola dirección. Por lo tanto, las direcciones
de rotación de las PU son fijas, lo que simplifica el algoritmo de mezcla ya
que no es necesario que las PU cambien su dirección de rotación. El algoritmo
de mezcla que se detalla a continuación asigna la salida del controlador a
diferentes conjuntos de PU, según la dirección de control.
La Figura 6 ilustra las PU
específicas utilizadas para activar el control de posición en los ejes X, Y y
Z. Para el movimiento en los ejes X, Y y Z, las cuatro PU en el hemisferio que
mira hacia la dirección del movimiento se activan simultáneamente, con dos
conjuntos de PU, cada uno de los cuales gira en el sentido de las agujas del
reloj y en el sentido contrario a las agujas del reloj. Por ejemplo, para
moverse en el+𝑋𝐵 dirección,
P2 y P7 girarán en el sentido de las agujas del reloj, mientras que P3 y P6
girarán en el sentido contrario a las agujas del reloj. Como resultado, las PU
produjeron pares y fuerzas que no están alineados con el+𝑋𝐵 dirección.
Estos se cancelan, dejando sólo el vector de fuerza combinado en el+𝑋𝐵 dirección.

Figura 6. Mapeo de control del empuje y torsión de PU al movimiento del cuerpo SpICED (Cubo) en la posición de los ejes X, Y y Z.
Por lo
tanto, la mezcla de control de posición X, Y y Z se define de la siguiente
manera:
{𝑢2𝑋=𝑢3𝑋=𝑢6𝑋=𝑢7𝑋= |𝜅𝑋𝑌𝑍máximo
( 0 ,𝑈𝑋)
|𝑢1𝑋=𝑢4𝑋=𝑢5𝑋=𝑢8𝑋= |𝜅𝑋𝑌𝑍mín ( 0
,𝑈𝑋) | (7)
{𝑢1𝑌=𝑢2𝑌=𝑢5𝑌=𝑢6𝑌= |𝜅𝑋𝑌𝑍máximo
( 0 ,𝑈𝑌)
|𝑢3𝑌=𝑢4𝑌=𝑢7𝑌=𝑢8𝑌= |𝜅𝑋𝑌𝑍mín ( 0
,𝑈𝑌) | (8)
{𝑢1𝑍=𝑢2𝑍=𝑢3𝑍=𝑢4𝑍= |𝜅𝑋𝑌𝑍máximo
( 0 ,𝑈𝑍)
|𝑢5𝑍=𝑢6𝑍=𝑢7𝑍=𝑢8𝑍= |𝜅𝑋𝑌𝑍mín ( 0
,𝑈𝑍) | (9)
Dónde 𝜅𝑋𝑌𝑍 es la
ganancia de mezcla para el movimiento de traslación. Máx (0 , 𝑈) y mín(0 , 𝑈) Las funciones
comprueban si la señal de control es positiva o negativa. Por ejemplo, si𝑈𝑌 es
negativo, esto indica que el controlador tiene la intención de ir hacia la
dirección Y negativa , lo que resulta en la activación de 𝑢3𝑌, 𝑢4𝑌, 𝑢7𝑌 y 𝑢8𝑌
. Tenga en cuenta que las
señales del actuador son valores absolutos debido a la dirección de rotación
fija de las PU mencionadas en la Sección 2.3 .
La Figura 7 ilustra las PU
específicas utilizadas para activar el control de actitud en el Pitch (𝜃 ), Rollo (𝜙) y guiñada (𝜓) ejes. Para el control
de actitud, se activan simultáneamente las PU con una dirección de torsión que
se alinea con la dirección de rotación prevista en actitud. Por ejemplo, para
rotar el dirigible en el+ 𝜓
dirección
alrededor del eje Yaw, P2, P4, P6 y P8 se activan simultáneamente para producir
torque. Debido a la ubicación de estas PU, las fuerzas de empuje producidas por
las PU se anulan entre sí. En este caso, el empuje producido por P2 se anula
con el empuje producido por P8, y el empuje producido por P4 se anula con el
empuje producido por P6. Por lo tanto, solo el torque producido por las PU
permanece y hace girar el cuerpo del dirigible alrededor del eje Yaw.

Figura 7. Mapeo de control del empuje y torsión de la PU al movimiento del cuerpo SpICED (Cubo) en Pitch (𝜃 ), Rollo (𝜙 ) y guiñada (𝜓 ) ángulo.
Por lo tanto, el tono (𝜃), Rollo (𝜙) y guiñada (𝜓) la mezcla de control
de posición se define como sigue:
{𝑢1𝜃=𝑢2𝜃=𝑢7𝜃=𝑢8𝜃= |𝜅𝜃𝜙 𝜓máximo ( 0 ,𝑈𝜃)
|𝑢3𝜃=𝑢4𝜃=𝑢5𝜃=𝑢6𝜃= |𝜅𝜃𝜙 𝜓mín ( 0 ,𝑈𝜃) | (10)
⎧⎩⎨𝑢2𝜙=𝑢3𝜙=𝑢5𝜙=𝑢8𝜙= |𝜅𝜃𝜙 𝜓máximo ( 0 ,𝑈𝜙)
|𝑢1𝜙=𝑢4𝜙=𝑢6𝜙=𝑢7𝜙= |𝜅𝜃𝜙 𝜓mín ( 0 ,𝑈𝜙) | (11)
⎧⎩⎨𝑢2𝜓=𝑢4𝜓=𝑢6𝜓=𝑢8𝜓= |𝜅𝜃𝜙 𝜓máximo ( 0 ,𝑈𝜓)
|𝑢1𝜓=𝑢3𝜓=𝑢5𝜓=𝑢7𝜓= |𝜅𝜃𝜙 𝜓mín ( 0 ,𝑈𝜓) | (12)
dónde𝜅𝜃𝜙 𝜓 es la ganancia de
mezcla para el movimiento de rotación.
Finalmente, las salidas de
control de todos los algoritmos de mezcla se combinan y se envían como comandos
de actuador a las ocho PU, de la siguiente manera:
𝑢𝑛=𝑢𝑛𝑋+𝑢𝑛𝑌+𝑢𝑛𝑍+𝑢𝑛𝜃+𝑢𝑛𝜙+𝑢𝑛𝜓 (13)
dónde𝑛 = { 1 , 2 , 3 , . . .
, 8 }
Las ganancias de mezcla y las
ganancias de PID para la configuración de cubo se dan en la Tabla 2.

3. Prototipo y Diseño
Experimental
3.1. Prototipo de unidad de
propulsión
La Figura 8 muestra el
prototipo de la PU y sus componentes. El motor de CC sin escobillas utilizado
en la construcción del prototipo de PU era un motor de CC sin escobillas de 18
mm de diámetro y 2900 rpm/V utilizado en el Mavic Mini de DJI [ 23 ], un cuadricóptero
en miniatura de menos de 250 g de peso. Se eligió el motor por su reducido peso
de sólo 6,7 g; sin embargo, está diseñado para hacer girar hélices pequeñas,
livianas y de giro rápido, lo que significa que no hay suficiente torque para
hacer girar objetos con un mayor momento de inercia. Esta limitación significa
que el diseño del impulsor del PU debe ser liviano y de pequeño diámetro para
reducir su momento de inercia alrededor del eje de rotación. La Figura 8 c
muestra el prototipo de impulsor de paletas curvas con un diámetro de 80 mm y
la Figura 8 d muestra el prototipo de impulsor de paletas rectas con un
diámetro de 90 mm. Los prototipos del impulsor y del soporte del motor se
imprimieron en 3D utilizando la tecnología Multi Jet Fusion [ 24 ] de HP, con
el PA12GB, un material termoplástico relleno de perlas de vidrio, para reducir
el espesor de la carcasa del impulsor a 0,6 mm y al mismo tiempo garantizar la
rigidez. de las partes.

Figura 8. ( a ) Prototipo de unidad de propulsión, ( b ) Base de la unidad de propulsión (montaje del motor) con motor sin escobillas, ( c ) Impulsor de paletas curvas, ( d ) Impulsor de paletas rectas.
El motor DC sin escobillas en
la PU se alimentaba a través de un cable de Circuito Impreso Flexible (FPC) que
contenía los tres cables para la alimentación trifásica del motor sin
escobillas. El FPC se colocó debajo de la base del soporte del motor y se adhirió
a la superficie del sobre del dirigible mediante adhesivos de doble cara. El
uso de un FPC es necesario para reducir el grosor de los cables que salen del
PU, lo que puede interrumpir el flujo de aire acelerado a lo largo de la
superficie producido por los impulsores giratorios.
3.2. Prototipo de cubo
La
Figura 9 muestra el prototipo SpICED con la configuración de propulsión cúbica.
La envoltura del globo de aluminio utilizada era la misma que la del prototipo
del tetraedro lateral, que estaba completamente inflado con gas helio hasta
obtener una forma esférica de unos 80 cm de diámetro, que contenía alrededor de
0,268 m.3 Volumen de gas helio. Dado que la capacidad de elevación del gas
helio al nivel del mar es de 1,114 kg/m3, el volumen de gas helio contenido en
la envoltura era capaz de elevar unos 298 g.

Se montaron dos conjuntos de
sistemas de propulsión idénticos en la parte superior e inferior de la
envoltura esférica del dirigible, cada conjunto con cuatro PU, conectados al
controlador electrónico de velocidad (ESC) 4 en 1 a través de un nuevo cable FPC
con infrarrojos (IR) integrados. LED como marcadores activos de seguimiento de
movimiento IR, como se muestra en la Figura 10 , como marcadores activos para
el sistema de captura de movimiento. Cada conjunto de sistema de propulsión
también tenía su propia unidad de placa de circuito impreso (PCB) de control de
vuelo diseñada a medida y su propia batería. El posicionamiento de las PU, con
su conexión a la electrónica y batería, se realizó de acuerdo con las
coordenadas mencionadas en la Tabla 1 , y el diseño ilustrado en el diagrama de
cuerpo libre de la Figura 4 .

Figura 10. LED IR montados en superficie en cables FPC que conectan las PU al ESC.
La Figura 11 muestra una PCB
de control de vuelo personalizada de seis capas que fue diseñada para integrar
electrónica de potencia, sensores y un microcontrolador con capacidad WiFi para
comunicaciones inalámbricas y para procesar datos de sensores para algoritmos
de control de vuelo a bordo del prototipo SpICED.

Figura 11. PCB de control de vuelo diseñado a medida.
La Figura 12 muestra el sistema electrónico montado en el prototipo SpICED, junto con la ubicación de los componentes principales, como la batería, ESC, y su conexión a las PU a través de los cables FPC, con los LED infrarrojos utilizados como marcadores activos para la captura de movimiento. sistema. La Tabla 3 muestra el desglose de los pesos de diferentes sistemas y componentes a bordo del prototipo SpICED (Cube).

Figura 12. Electrónica y sistema de potencia en el prototipo SpICED.

En la Figura 13 se muestra una
comparación de la distribución de masa con el prototipo del tetraedro lateral .
Debido al menor número de PU en la configuración de tetraedro lateral, la
proporción masiva de PU y electrónica fue un 19 % y un 6 % menor en comparación
con la configuración de cubo, mientras que la capacidad de batería/carga útil
fue un 25 % mayor en comparación con la configuración de cubo.

Figura 13. Distribución de masa del prototipo de cubo y del prototipo de tetraedro lateral.
3.3. Configuración de medición
del rendimiento de la unidad de propulsión
El rendimiento de la PU se
midió utilizando la configuración que se muestra en la Figura 14 , midiéndose y
registrándose las RPM, la fuerza y el torque de la PU. La carcasa del
hemisferio utilizada en la instalación se produjo llenando un molde de
hemisferio acrílico con espuma autoexpandible de poliuretano. Se colocó un
sensor de fuerza-torque ATI Nano43 debajo de la carcasa del hemisferio
utilizando adhesivo de doble cara para medir la fuerza y el torque producido
por la PU. La velocidad de rotación del impulsor se midió utilizando el ESC
midiendo la fuerza contraelectromotriz producida por el giro del motor CC sin
escobillas. La primera prueba consistió en un programa que alterna entre 10
niveles de aceleración de 0 a 100% para medir la relación entre la velocidad de
rotación del impulsor y la fuerza y el torque producido por la PU.

3.4. Configuración del
experimento de control de circuito cerrado
La Figura 15 muestra el
diagrama del sistema electrónico y de control implementado en el sistema
prototipo SpICED. El sistema de control y electrónica a bordo constaba de
cuatro conjuntos de motores CC sin escobillas en las PU, cada uno controlado
por un ESC que recibe energía de una batería de polímero de litio de dos
celdas, con señales de aceleración recibidas directamente desde un receptor de
control de radio/WiFi a bordo. Para el prototipo SpICED con configuración de
cubo, había dos conjuntos idénticos de sistemas electrónicos y de energía a
bordo, como se menciona en la Sección 3.2.

Figura
15.
Interfaz electrónica del sistema de captura de movimiento al prototipo SpICED.
La posición del dirigible se
capturó utilizando un sistema de captura de movimiento por infrarrojos y se
introdujo en el código del bucle de control de la Figura 5 que se ejecuta en
MATLAB en una PC externa conectada a las cámaras de captura de movimiento.
Luego, la salida calculada de los controladores PID se pasó a través de un
algoritmo mezclador, que la convierte al valor del acelerador para cada una de
las PU. Finalmente, la señal de aceleración fue enviada al prototipo SpICED a
través del módulo transmisor de radiocontrol/WiFi. Posteriormente, las señales
de aceleración recibidas se enviaron a los ESC individuales, que controlan la
velocidad de rotación de las PU individuales.
4.1. Resultados de rendimiento
de los prototipos de unidades de propulsión
Como descubrimos en el
artículo anterior, las PU bidireccionales con impulsores de paletas rectas
utilizadas en el prototipo del tetraedro lateral producen empuje y torsión
simétricos en rotaciones tanto en el sentido de las agujas del reloj como en el
sentido contrario a las agujas del reloj. Sin embargo, tuvieron una respuesta
transitoria deficiente cuando se invirtió su dirección de rotación debido al
motor CC sin escobillas de bajo torque que se utilizó y al mayor momento de
inercia del impulsor en comparación con la hélice liviana para la que fue
diseñado el motor. Por lo tanto, al utilizar más PU con direcciones de rotación
fijas en la configuración del cubo, estamos interesados en comparar el
rendimiento de las PU bidireccionales y las PU unidireccionales.
4.1.1. Unidad de propulsión
unidireccional con impulsor de paletas curvas
Como la PU unidireccional está
equipada con un impulsor de paletas curvas, el rendimiento de empuje y torsión
de las direcciones de rotación hacia adelante y hacia atrás difería.
La Figura 16 muestra el empuje
y el par medidos de la PU unidireccional frente a la velocidad de rotación. 𝜔2, como lo captura la configuración
de medición del rendimiento en la Figura 14 con la superficie del hemisferio
curvado. El ESC proporciona una señal del actuador con 10 pasos iguales del 0%
al 100%, con 2 s de estado estable𝐹𝑃,𝜏𝑃y𝜔 mediciones recopiladas
en cada paso, que luego se promediaron para producir los puntos de datos que se
muestran en la Figura 16 . En la dirección de rotación hacia adelante, el
impulsor de paletas curvas es capaz de alcanzar una mayor velocidad de rotación,
junto con un mayor empuje y un menor par. En la dirección de rotación inversa,
el impulsor gira más lentamente, con una entrada del actuador similar,
produciendo menos empuje y más torque. El empuje máximo producido en la
dirección de rotación hacia adelante es aproximadamente un 60,9% mayor que el
empuje máximo producido en la dirección de rotación inversa.

Figura 16. 𝐹𝑃y|𝜏𝑃 de PU unidireccional con impulsor curvo que gira en ambos sentidos de rotación contra𝜔2
Según los datos medidos de empuje y torsión del experimento
que se muestra en la Figura 16 , el𝛽𝑡y𝛽𝑑 de la
PU unidireccional, como se menciona en las ecuaciones ( 2 ) y ( 3 ), son𝛽𝑡=
2,133 ×10− 7,𝛽𝑑= 9,84
×10− 6
.
4.1.2. Comparación entre PU bidireccionales y
unidireccionales
La Figura 17 muestra el empuje
y el par medidos de las PU bidireccionales y unidireccionales frente al nivel
de señal del actuador enviado al ESC que impulsa la PU. El ESC recibió una
señal del actuador con 10 pasos iguales del 0% al 100%, con 2 s de estado
estable 𝐹𝑃y𝜏𝑃 ediciones
recopiladas en cada paso, que luego se promediaron para producir los puntos de
datos que se muestran en la Figura 17 . Este experimento se repitió tanto para
el impulsor de paletas rectas como para el impulsor de paletas curvas en el
sentido de giro de las agujas del reloj. La PU unidireccional con impulsor
curvo es capaz de producir alrededor de un 27,7 % más de empuje máximo con
menos par en comparación con la PU bidireccional con impulsor recto.
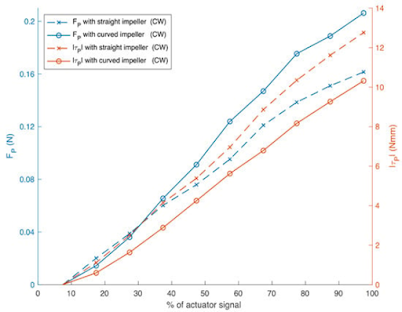
Figura 17. Comparación de𝐹𝑃y|𝜏𝑃| de dos tipos de PU contra porcentaje de señal del actuador.
La Figura 18 muestra la
potencia y eficiencia medidas de las PU bidireccionales y unidireccionales
frente al nivel de señal del actuador enviada al ESC que impulsa la PU. Al ESC
se le dio una señal del actuador con 10 pasos iguales del 0% al 100%, con 2 s
de potencia en estado estable, y𝐹𝑃
Se
recogieron mediciones en cada paso, que luego se promediaron para calcular la
eficiencia que se muestra en la Figura 18 . Este experimento se repitió para
impulsores de paletas rectas y curvas en el sentido de giro de las agujas del
reloj. Al comparar el consumo de energía eléctrica y la eficiencia de las PU,
la Figura 18 muestra que la PU unidireccional con un impulsor curvo consume
menos energía eléctrica y es más eficiente energéticamente en comparación con
la PU bidireccional con un impulsor recto, que alguna vez estuvo por encima.
Rango del 20% de la señal del actuador. A medida que la señal del actuador
aumenta en más de un 30%, el consumo de energía de las PU aumentó
drásticamente, mientras que la eficiencia se redujo significativamente. Esto
sugiere que las PU funcionan con la mejor eficiencia alrededor del 20-30% del
rango de la señal del actuador.

Figura
18.
Comparación de Potencia y Eficiencia de dos tipos de PU versus porcentaje de
señal del actuador.
4.2. Respuesta del control de
pasos para control de altitud, cabeceo, balanceo y guiñada
Se realizó un experimento de
respuesta escalonada para determinar el rendimiento del controlador de altitud,
cabeceo, balanceo y guiñada en el prototipo SpICED (Cube). El rendimiento de la
respuesta escalonada del control de altitud se puede ver en la Figura 19 , que
muestra una sección de los datos experimentales para una mejor visualización.
Se proporcionó un total de 14 entradas de pasos alternos con puntos de ajuste Z
que alternaban entre 1,0 m y 1,5 m cada 20 s para el control de altitud, y el
tiempo promedio de aumento de 0 a 90% fue de 7,23 s, lo que indica un
rendimiento de respuesta de paso de altitud similar en comparación. al tiempo
de subida de 7,2 s en el prototipo SpICED (Side-tetra.) en nuestro artículo
anterior [ 20 ].

El rendimiento de la respuesta
escalonada del control de guiñada se puede ver en la Figura 20 , que muestra
una sección de los datos experimentales para una mejor visualización. Un total
de 15 entradas de paso alternas con puntos de ajuste de guiñada que alternan
entre 0∘y 90∘ se proporcionaron cada 30 s
para el control de guiñada, y un tiempo de subida promedio que oscila entre 0 %
y 90 % es de 6,39 s, lo que indica un rendimiento de respuesta de paso de
guiñada similar en comparación con el tiempo de subida de 6,38 s en el
prototipo SpICED (Side-tetra.) en nuestro artículo anterior [ 20 ].

El rendimiento de la respuesta
escalonada del control de cabeceo y balanceo se puede ver en la Figura 21 y la
Figura 22 , que muestran una sección de los datos experimentales para una mejor
visualización. Un total de 14 entradas de paso alternas con puntos de ajuste de
cabeceo y balanceo que alternan entre +45∘
y
−45∘ Se administraron cada 30 s
para el control de cabeceo y balanceo. El tiempo medio de subida de 0% a 90%
para el control de cabeceo fue de 7,25 s y de 6,15 s para el control de
balanceo. Puede encontrar un vídeo compilado del experimento de respuesta
escalonada en: https://youtu.be/-26HgRGj5Zc (consultado el 28 de julio de
2022).

Figura
21.
Respuesta al paso de rodadura de SpICED (Cube).

Figura 22. Respuesta al paso de tono de SpICED (Cube).
Según el resultado de la
respuesta al paso del prototipo SpICED (Cube), las desviaciones fueron
relativamente menores en comparación con la respuesta al paso del prototipo
SpICED (Side-tetra.) en nuestro artículo anterior [ 20 ], excepto para los ejes
de cabeceo y balanceo. debido a la naturaleza autoestabilizadora de la
configuración del tetraedro lateral con un CG más bajo. Esto puede deberse al
uso de PU unidireccionales, lo que elimina la necesidad de cambiar la dirección
de rotación de las PU para el control de actitud. Esto elimina el tiempo de
retraso para la inversión de la rotación, como se menciona en nuestro artículo
anterior [ 20 ], lo que permite un control más preciso y sensible de la
posición y la actitud.
El controlador de cabeceo y
balanceo, con las mismas ganancias PID que el controlador de guiñada, produjo
una respuesta escalonada que es diferente del control de guiñada. Esto se debe
a la diferencia en el momento de inercia entre los ejes de cabeceo/giro y
guiñada, y los ejes de cabeceo y balanceo tienen un momento de inercia mucho
mayor debido a la ubicación de las baterías y la electrónica de control en la
parte superior e inferior de la esfera esférica del dirigible. cuerpo.
A partir del resultado de este
experimento de respuesta de control de pasos, podemos determinar algunos
parámetros de rendimiento, que pueden compararse con ZeRONE [ 14 ] con su
sistema de propulsión de matriz de microventiladores piezoeléctricos. El prototipo
ZeRONE logró una aceleración de ascenso y descenso vertical de aproximadamente
0,01275 m/s2, mientras que el prototipo SpICED (Cube) alcanzó 0,05339 m/s2. En
términos de aceleración de rotación, el ZeRONE logró aproximadamente 4∘/s2, mientras que el prototipo
SpICED (Cube) logró 21,23∘/s2 .
Este resultado muestra que el sistema de propulsión de SpICED es capaz de
producir una mayor aceleración lateral y rotacional en comparación con ZeRONE.
4.3. Rendimiento de
seguimiento de waypoints 2D
Para una comparación directa
del rendimiento del control entre las configuraciones SpICED (Side-tetra.) y
SpICED (Cube), se realizó un experimento de waypoint 2D para ambos prototipos,
que prueba la capacidad de los prototipos para trasladar horizontalmente los
ejes 𝑋𝑌.
A los prototipos SpICED se les
asignó la tarea de seguir una serie de objetivos de puntos de referencia
cambiantes en intervalos de 30 s, utilizando cuatro puntos de referencia con
coordenadas 𝑋𝑌 de [1.0, 1.0], [−1.0, 1.0], [−1.0, −1.0],
[1.0, −1.0]. A lo largo del experimento, la altitud deseada se estableció en
1,2 m con el rumbo deseado en 90 grados. Los prototipos SpICED siguieron los
cuatro puntos de referencia durante tres rondas con un rendimiento consistente,
y el resultado experimental de una de las tres rondas se muestra en la Figura
23, con el gráfico superior mostrando una trayectoria 2D de los vuelos
realizados en el plano 𝑋𝑌,
y
el gráfico inferior que muestra la trayectoria en 3D. La Figura 24 muestra los
datos de vuelo con respecto al tiempo, incluida la altitud y la guiñada con
puntos de ajuste, que se mantuvieron constantes durante todo este experimento.
Puede encontrar un vídeo de este experimento en: https://youtu.be/PGb66QrO0ik
(consultado el 28 de julio de 2022).

Figura
23.
Gráfico de trayectoria de prototipos SpICED en un experimento de waypoint.

Figura 24. Gráfico temporal de prototipos SpICED en un experimento de waypoint.
La Tabla 4 es el error
cuadrático medio (RMS) calculado de la trayectoria de los dos prototipos en
cada eje del experimento del punto de referencia. Como puede verse, el
prototipo SpICED (Cube) tiene significativamente menos errores en comparación
con el prototipo SpICED (Side-tetra.). Según este experimento de waypoint, se
logró una reducción de alrededor del 30 % al 40 % en el error RMS de𝑋,𝑌, 𝑍 , 𝜓 El control de posición
se puede ver al comparar el prototipo SpICED (Cube) con el prototipo SpICED
(Side-tetra.).

A partir de los resultados de
este experimento, se puede ver que el prototipo SpICED (Cube) puede seguir las
rutas directas entre los puntos de referencia más de cerca que el prototipo
SpICED (Side-tetra.) con menos desviaciones. Además, las grandes desviaciones
en altitud y guiñada durante el movimiento del eje X del prototipo SpICED (Side-tetra.)
muestran que existen problemas de acoplamiento en la configuración del
tetraedro lateral entre el movimiento horizontal y el movimiento y rotación
vertical, debido a la ubicación de las PU, como se muestra en la Figura 3 e,
donde la PU única activada para el empuje horizontal también produce
componentes de empuje y torsión verticales. La fuerte corrección en la posición
del eje X del prototipo de tetraedro lateral entre los 50 y 55 s del
experimento se debe posiblemente al cambio de dirección de rotación de las PU,
que toma alrededor de 3,5 s, como se descubrió en nuestro artículo anterior.
papel [ 20 ]. En este escenario, a medida que las PU reducen la velocidad para
invertir la dirección de rotación, el prototipo del dirigible pierde temporalmente
el control de vuelo y, por lo tanto, se desvía de su trayectoria prevista, de
la que luego se recupera agresivamente cuando se invierten las direcciones de
rotación de las PU.
En conclusión, el prototipo
SpICED (Cube) puede seguir los puntos de referencia y mantener su altitud y
control de guiñada significativamente mejor, con menos desviaciones, en
comparación con el prototipo SpICED (Side-tetra.). Esto es de esperarse, ya que
la configuración SpICED (Cube) utiliza el doble de PU, que solo giran en una
sola dirección, por lo que no hay problemas con el tiempo de retraso asociado
con la inversión de rotación en comparación con la PU bidireccional en el
Prototipo SpICED (Side-tetra.). La configuración SpICED (Cube) tampoco tiene
problemas de acoplamiento entre el control de diferentes ejes debido a la
colocación de pares de PU contrarrotativos, que pueden cancelar cualquier
empuje y torsión no deseados.
5. Conclusiones
En el artículo anterior, la
configuración de tetraedro lateral elegida para la creación de prototipos
mostró problemas de acoplamiento al intentar la traslación horizontal, lo que
produjo fuerzas y pares no deseados a lo largo del eje vertical del dirigible.
Junto con el alto tiempo de retraso causado por la inversión de rotación del
PU, se encontraron grandes desviaciones en la altitud y el rumbo cada vez que
se le pedía al dirigible que se trasladara horizontalmente. Como el tiempo de
retraso no se modeló en la simulación, la diferencia en el resultado del
seguimiento del punto de referencia muestra su influencia significativa en el
rendimiento del control.
Para la configuración de cubo
probada en este artículo, el uso de más PU permitió que la PU fuera
unidireccional y eliminó la necesidad de invertir la rotación, lo que mejoró
significativamente el rendimiento del control de vuelo del prototipo de dirigible.
Sin embargo, el uso de más PU hizo que el peso del sistema de propulsión casi
se duplicara, ocupando el 45,6% del presupuesto de peso total, quedando menos
presupuesto de peso para la batería y el sistema electrónico.
En este artículo, se presenta
una prueba de concepto para un diseño de dirigible esférico seguro con PU, que
proporcionan empuje a través del efecto Coandă. Se presentaron y simularon
diferentes configuraciones de PU con el esquema de control desarrollado. Se
realizaron experimentos con los prototipos de PU para determinar su
rendimiento. Se desarrollaron dos sistemas prototipo de SpICED con
configuraciones de tetraedro lateral y cubo y se utilizaron para realizar
experimentos de control de vuelo. Por último, los resultados experimentales
muestran que el sistema prototipo SpICED es controlable y se discutieron las
diferencias.
Trabajo futuro
En el futuro, puede ser
beneficioso explorar un diseño de controlador PID de avance para la
configuración de tetraedro lateral para reducir las desviaciones en altitud y
guiñada cuando sea necesario el movimiento horizontal. Un motor más pequeño y
sin escobillas en la PU, con un par más alto para impulsar los impulsores,
también puede mejorar el rendimiento del control, ya que el motor disponible
actualmente en el mercado fue diseñado para impulsar hélices livianas. Las
optimizaciones del diseño del impulsor de la PU pueden proporcionar más empuje
y eficiencia, lo que también puede mejorar el rendimiento del control de
SpICED.
Una vez verificada la
controlabilidad de la plataforma SpICED, se podrían explorar otros aspectos de
un dirigible sUAS para avanzar más en escenarios de uso comercial del mundo
real. Algunas posibles áreas de investigación pueden implicar el uso de un sistema
de localización interior de menor costo, como la triangulación utilizando un
sistema de radio de banda ultraancha, ya que esto puede reducir el costo de
implementación de un dirigible sUAS interior y aumentar la adopción. Para
reducir el personal operativo del dirigible suUAS, también es necesario
investigar tecnologías que puedan utilizarse para automatizar procesos como la
carga de baterías y el llenado de helio debido a las pérdidas por la
permeabilidad de la envoltura del dirigible. El desarrollo de una estación de
acoplamiento para el dirigible sUAS puede permitir operaciones persistentes en
el ambiente interior a través de procesos automatizados de recarga y recarga, y
puede aumentar el atractivo de esta plataforma interior sUAS. El procesamiento
de información, como imágenes, utilizando técnicas de aprendizaje automático
también puede permitir funciones avanzadas, como el seguimiento del personal de
tierra, o permitir nuevos modelos de interacción entre drones y humanos.
Contribuciones de autor
Conceptualización, YHP y SKHW;
metodología, YHP y SKHW; software, YHP y SKHW; validación, YHP, SKHW y SF; análisis formal,
YHP y SKHW; investigación, YHP; recursos, SF; curación de datos, YHP;
redacción: preparación del borrador original, YHP; redacción: revisión y
edición, YHP y SKHW; visualización, YHP; supervisión, SF; administración de
proyectos, SF; adquisición de financiación, SF Todos los autores han leído y
aceptado la versión publicada del manuscrito.
Fondos
Esta
investigación no recibió financiación externa.
Declaración
de disponibilidad de datos
Datos
disponibles bajo petición.
Conflictos
de interés
Los
autores declaran no tener ningún conflicto de intereses.
Referencias
Drones, A. Niveles de ruido de los drones. 2020. Disponible en línea:
https://www.airbornedrones.co/drone-noise-levels/ (consultado el 21 de julio de
2021).
DJI. Fantasma 4 Pro.
Disponible en línea: https://www.dji.com/sg/phantom-4-pro (consultado el 26 de
julio de 2021).
Johnson, JA; Svach, señor;
Brown, LH Drones y otras lesiones por aviones aficionados observadas en los
departamentos de emergencia de EE. UU., 2010-2017. Soy. J. Anterior. Medicina.
2019 , 57 , 826–829. [ Google Scholar ] [ CrossRef ]
Burri, M.; Gasser, L.; Käch,
M.; Krebs, M.; Laube, S.; Ledergerber, A.; Meier, D.; Michaud, R.; Mosimann,
L.; Muri, L.; et al. Diseño y control de un dirigible omnidireccional esférico.
En Actas de la Conferencia Internacional IEEE/RSJ de 2013 sobre Robots y
Sistemas Inteligentes, Tokio, Japón, 3 a 7 de noviembre de 2013; páginas.
1873–1879. [ Google Académico ]
Juang, M. ¡Eso no es un globo,
es un dron! Halo surca los cielos como última tendencia en vehículos aéreos no
tripulados. 2017. Disponible en línea:
https://www.cnbc.com/2017/05/06/thats-no-balloon-its-a-drone-halo-takes-to-the-skies-as-latest-trend-in
-uavs.html (consultado el 5 de julio de 2021).
Sharf, I.; Persson, S.;
St-Onge, D.; Reeves, N. Desarrollo de Aerobots para emulación, arquitectura y
arte de satélites ; Springer: Berlín/Heidelberg, Alemania, 2013. [ Google
Scholar ] [ CrossRef ]
Panasonic. Panasonic
desarrolla el prototipo Ballooncam™, un sistema de drones para organizar
deportes y eventos. 2016. Disponible en línea:
https://news.panasonic.com/global/topics/2016/45314.html
(consultado el 6 de julio de 2021).
Festo. eMotionSpheres. 2014.
Disponible en línea:
https://www.festo.com/group/en/cms/10220.htm
(consultado el 5 de julio de 2021).
Festo. Manejo de movimiento
libre. 2017. Disponible en línea:
https://www.festo.com/group/en/cms/11957.htm
(consultado el 5 de julio de 2021).
Festo. Pingüinos aéreos. 2009.
Disponible en línea:
https://www.festo.com/group/en/cms/10242.htm
(consultado el 5 de julio de 2021).
Festo. Rayo_aire. 2010.
Disponible en línea:
https://www.festo.com/group/en/cms/10245.htm
(consultado el 5 de julio de 2021).
Festo. AirJelly. 2010.
Disponible en línea:
https://www.festo.com/group/en/cms/10244.htm
(consultado el 5 de julio de 2021).
Poon, HS; Lam, MK; Chow, M.;
Li, WJ Tecnología de propulsión iónica silenciosa y sin vibraciones para
dirigibles de vigilancia en interiores. En Actas de la Conferencia
Internacional IEEE sobre Robótica y Automatización de 2009, Kobe, Japón, 12 a
17 de mayo de 2009; págs. 2891–2896. [ Google Académico ]
Yamada, W.; Manabe, H.; Ikeda,
D. Zerone: Dron de seguridad con propulsión sin palas. En Actas de la
Conferencia CHI de 2019 sobre factores humanos en sistemas informáticos,
Escocia (Reino Unido), 4 y 5 de mayo de 2019; págs. 1–8. [ Google Académico ]
Song, SH; Shon, H.; Yeon, G.;
Choi, H. Diseño e implementación de Soft Drone S-Cloud similar a una nube. En
Actas de la Conferencia Internacional IEEE/RSJ de 2018 sobre Robots y Sistemas
Inteligentes (IROS), Madrid, España, 1 a 5 de octubre de 2018; págs. 1–9. [
Google Scholar ] [ CrossRef ]
Magister, T. La estimación del
potencial de lesiones basada en criterios contundentes de aviones pequeños no
tripulados. Seguro. Ciencia. 2010 , 48 , 1313–1320. [ Google Scholar ] [
CrossRef]
Bir, C.; Viano, D. Criterios
de diseño y evaluación de lesiones por impactos balísticos contundentes. J.
Trauma 2005 , 57 , 1218–1224. [ Google Scholar ] [ CrossRef ] [ PubMed ]
Sturdivan, L. Modelado en la
investigación del trauma contundente. En Actas del Segundo Simposio Anual sobre
Armadura Corporal Blanda, Miami Beach, FL, EE. UU., 1 de septiembre de 1976. [
Google Scholar ]
Clara, VR; Lewis, JH;
Mickiewicz, AP; Sturdivan, LM Correlación de datos de traumatismos contundentes
; Reporte técnico; Edgewood Arsenal Aberdeen Proving Ground: Edgewood, MD, EE.
UU., 1975. [ Google Scholar ]
Pheh, YH; Gana, SKH; Foong, S.
SpICED: Diseño y control de un dirigible esférico seguro mediante el efecto
Coandă. En Actas de la Conferencia Internacional IEEE/ASME de 2021 sobre
Mecatrónica Inteligente Avanzada (AIM), Delft, Países Bajos, 13 a 16 de julio
de 2021. [ Google Scholar ]
Ahmed, R.; Talib, AA; Rafie,
AM; Djojodihardjo, H. Aerodinámica y mecánica de vuelo de MAV basada en el
efecto Coandă. Aerosp. Ciencia. Tecnología. 2017 , 62 , 136-147. [ Google
Scholar ] [ CrossRef ]
Eraslán, Y.; Özen, E.; Oktay,
T. El efecto del cambio de ángulo entre los brazos del rotor en la calidad del
seguimiento de la trayectoria de un cuadricóptero controlado por PID. En actas
de la décima conferencia internacional de EJONS sobre matemáticas, ingeniería y
ciencias médicas naturales, Batumi, GA, EE. UU., 15 a 17 de mayo de 2020. [
Google Scholar ]
DJI. Mavic Mini. Disponible en
línea: https://www.dji.com/sg/mavic-mini (consultado el 21 de julio de 2021).
CV. Tecnología HP Multi Jet
Fusion. Disponible en línea:
https://www.hp.com/us-en/printers/3d-printers/products/multi-jet-technology.html
(consultado el 21 de junio de 2021).
Rey Hobby. Paquete Lipo
Turnigy Nano-Tech 550mAh 2S 65C (compatible con E-Flite). 2022. Disponible en
línea:
https://hobbyking.com/en_us/turnigy-nano-tech-450mah-2s-65c-lipo-e-flite-compatible-blade-130x-eflb3002s35.html
(consultado el 31 de agosto de 2022).
Diatona. MAMBA F40 BLS MINI
Dshot600 4IN1 ESC 40A 6S. 2022. Disponible en línea:
https://www.diatone.us/products/mamba-f40-_bls-mini-dshot600-4in1-esc-40a-6s.
(consultado el 31 de agosto de 2022).
Nota del editor: MDPI se
mantiene neutral con respecto a reclamos jurisdiccionales en mapas publicados y
afiliaciones institucionales.
© 2022 por los autores. Licenciatario MDPI, Basilea, Suiza. Este artículo es un artículo de acceso abierto distribuido bajo los términos y condiciones de la licencia
Creative Commons Attribution (CC BY) ( https://creativecommons.org/licenses/by/4.0/ ).
Compartir y citar
Estilo MDPI y ACS
Pheh, YH; Kyi Hla Win, S.; Foong, S. Drone esférico con
efecto coandă para interiores (SpICED): un dirigible esférico sUAS para uso
seguro en interiores. Drones 2022 , 6 , 260.
https://doi.org/10.3390/drones6090260
Estilo AMA
Pheh YH, Kyi Hla Win S, Foong S. Drone esférico con efecto
coandă para interiores (SpICED): un dirigible esférico sUAS para uso seguro en
interiores. Drones . 2022; 6(9):260. https://doi.org/10.3390/drones6090260
Estilo Chicago/Turabiano
Pheh, Ying Hong, Shane Kyi Hla Win y Shaohui Foong. 2022.
"Dron esférico con efecto coandă para interiores (SpICED): un dirigible
esférico sUAS para uso seguro en interiores" Drones 6, no. 9: 260. https://doi.org/10.3390/drones6090260
Enlace al artículo:
https://www.mdpi.com/2504-446X/6/9/260













